Introducing EddyClimber
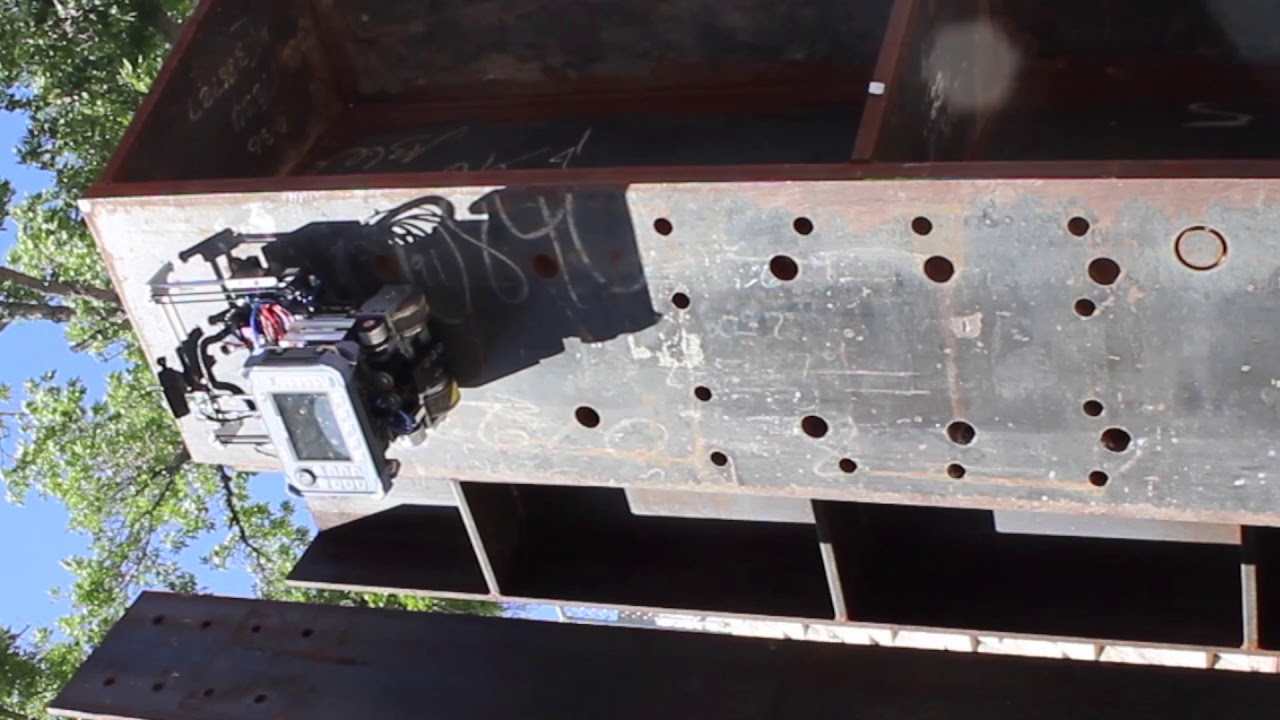
EddyClimber is a wall-climbing inspection robot that unifies eddy current non-destructive sensing with multi-camera visual perception to autonomously detect surface and subsurface fatigue cracks in steel bridge structures with 99% accuracy. Unlike conventional inspection platforms that rely on a single sensing modality, EddyClimber fuses electromagnetic crack signatures with depth-aware visual data in real time, enabling continuous structural health monitoring without traffic closure or human risk. Deployed as part of AIR Corporation's InfraGuard platform, EddyClimber navigates complex steel geometries using magnetic wheels, streams live sensor data to a 3D digital twin, and generates comprehensive structural reports turning required days of manual, dangerous inspection into a fully autonomous operation.